


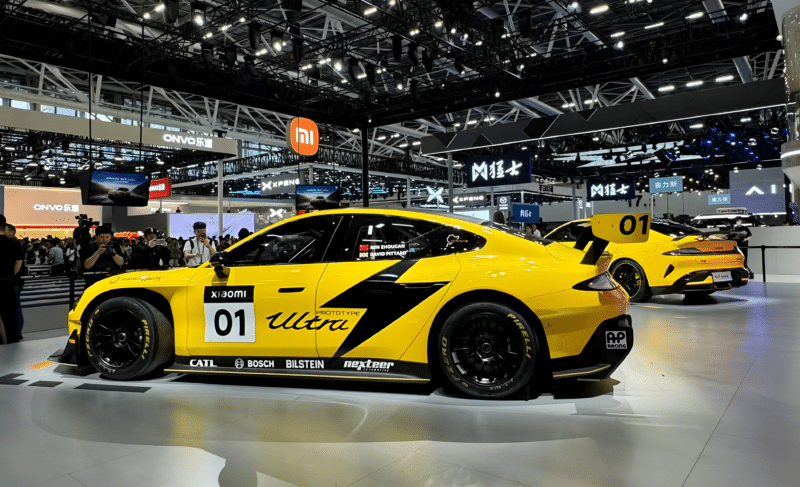
During the 2024 Guangzhou Auto Show, Lei Jun, the founder of Xiaomi, made an exciting announcement regarding the Xiaomi SU7 Ultra. According to Jun, the Xiaomi SU7 Ultra achieved an impressive top speed of 359.71 km/h during a recent high-speed test at the CATARC Yan Cheng Automotive Proving Ground. Jun emphasized that the limiting factor for the SU7 Ultra’s maximum speed was not the car itself but the test track’s constraints.
The Xiaomi SU7 Ultra is set to take on major tracks across China in the upcoming year, including a return to the renowned Nürburgring. The prototype car has already set a new record as the fastest four-door car around the track, completing the Nürburgring lap in just 6 minutes 46.874 seconds. The dimensions of the SU7 Ultra are 5070 mm in length, 1970 mm in width, and 1465 mm in height, with a wheelbase of 3000 mm. It weighs 2360 kg and can comfortably seat five passengers.
The high-speed test at the Nürburgring was conducted by David Pittard, the 2023 Nürburgring 24-Hour Endurance Race champion, who reached a maximum speed of 324 km/h on the track’s back straight. Following the successful test, the vehicle was transported back to China and showcased at the 2024 Guangzhou Auto Show.
Despite being on the market for only 230 days, the Xiaomi SU7 has already manufactured 100,000 units. Within ten minutes of the SU7 Ultra’s announcement, Xiaomi received an impressive 3,680 pre-orders, all of which are refundable.
In addition to the exciting news about the Xiaomi SU7 Ultra, Lei Jun also introduced Xiaomi’s new Hyper-Autonomous Driving (HAD) system. The HAD system is set to undergo internal trials starting on November 16, with a broader public release expected by December.
The HAD system aims to enhance driving efficiency and safety by providing smoother driving behavior and reducing sudden acceleration and braking. By utilizing real-world driving data, the system can improve route predictions and adjust driving decisions based on real-time conditions.
Xiaomi highlighted that the HAD system can navigate through complex environments, including narrow spaces, busy intersections, and roads with obstacles. The introduction of a Vision-Language Model (VLM) is intended to enhance the system’s ability to handle intricate scenarios such as uneven road surfaces, construction zones, and T-junctions.


